
Aanpak
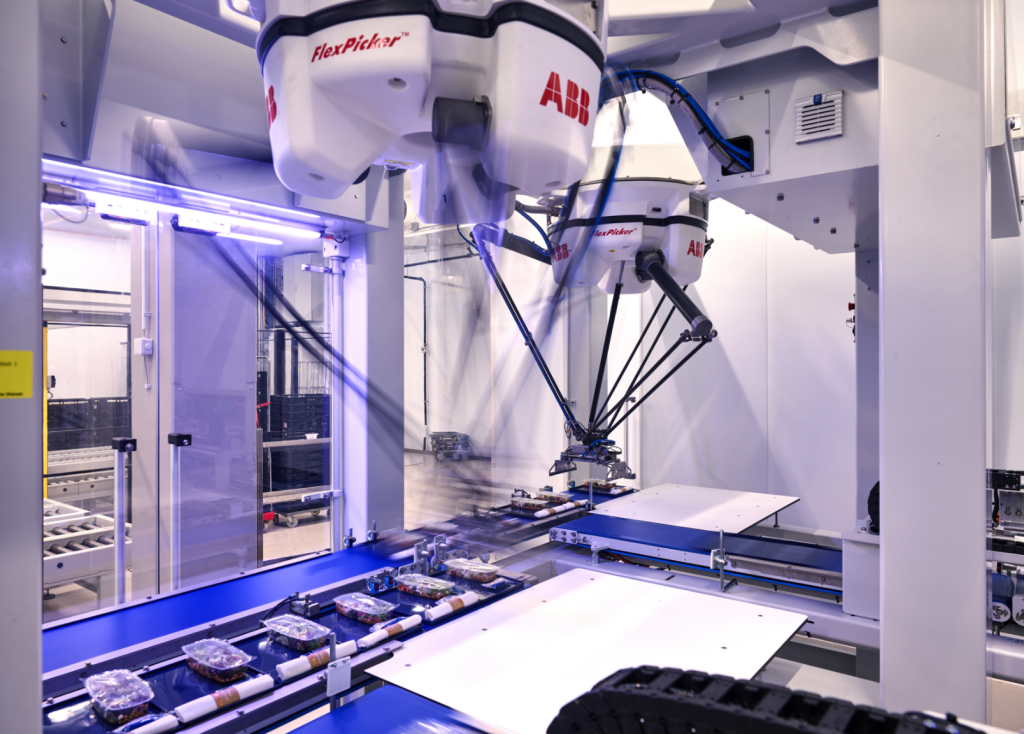
Een vision systeem, aan het begin van de installatie, staat in voor de kwaliteitscontrole en de locatiebepaling van iedere tub. De verkregen informatie wordt via een een speciaal daarvoor ontwikkelde interface vertaald naar een code die de twee pick & place robots in staat stelt om goedgekeurde tubs op de juiste locatie op te pikken. De robots zijn uitgerust met een conveyortracking die de tubs perfect kunnen volgen op de bewegende band. Bovendien bevatten de robots ook een multimove functie. Beide robots weten van elkaar wat ze precies doen en blijven zo uit elkaars vaarwater. De tools waarmee de robots de kuipjes oppikken, worden door Devion zelf ontwikkeld en 3D geprint.
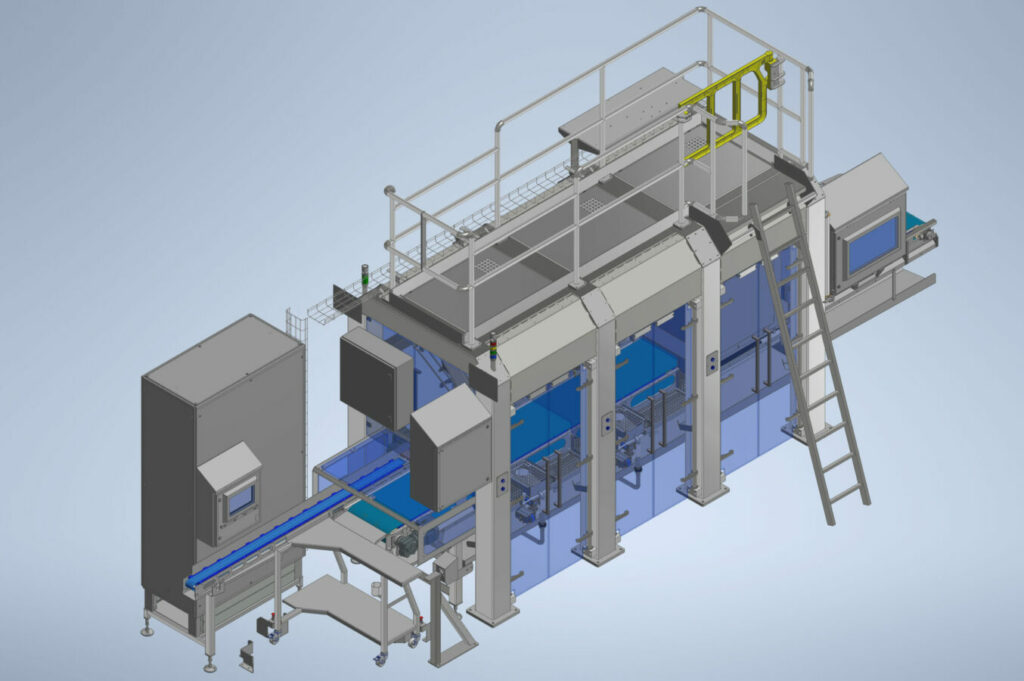
Eén van de installatie wordt uitgerust met een kartonlegger. Deze bestaat uit een afzonderlijke, uitwisselbare buffercassette en een robotapplicator met vacuum-gripper. Operators kunnen de buffercassette bijvullen met kartonnen trays zonder dat de continuiteit van de installatie in het gedrang komt. De cassette is eenvoudig te demonteren en in te wisselen, zodat in de toekomst ook andere types onderleggers inzetbaar worden. De robotapplicator plaatst de tray op een transportband die parallel loopt met de aanvoerband van de tubs. Via conveyortracking weet de robot waar de onderleggers afgelegd dienen te worden. Deze band past zijn snelheid aan volgens de plaatsbehoefte van de flexpickers. Op die manier vormen we steeds volle stapels. Om verlies van karton op te sporen, voorzien we vaccuümdetectie.